Resumen:
Este documento presenta principalmente el controlador integrado inteligente de EC160A de INVT utilizado para la modernización del elevador KONE en la India. Proporciona la solución de actualización detallada para el elevador KNOE y los detalles de puesta en servicio. La práctica de ingeniería muestra que el controlador integrado inteligente de EC160A de INVT tiene un buen rendimiento de control y estabilidad en el elevador KNOE.
Palabras clave: EC160A, modernización de elevadores KNOE, máquina inteligente integrada.
I. Introducción
El elevador KONE es la marca de 5 elevadores más importantes del mundo y tiene una participación de mercado muy grande en India. KONE tiene su propio sistema de control especial y motor que no son compatibles con otros sistemas de control y motor de marca. Así que KONE gobernó el mercado de servicios posventa. Cualquier pieza rota, los usuarios finales tienen que ir con repuestos costosos de KONE. Entonces los usuarios se quejan mucho pero no hay otra opción.
Ahora INVT ha desarrollado el controlador integrado inteligente de elevador EC160A que puede conducir el motor KONE y reemplazar todo el sistema de control. Puede romper el monopolio de KONE en el mercado de servicios posventa. El controlador integrado inteligente del elevador EC160A tiene las siguientes características.
Función básica
• Reducción de recursos en la instalación, depuración, operación y gestión de ascensores.
• Velocidad máxima: 6 m / s Piso máximo: 64
• El control de grupo de red inteligente puede controlar 8 ascensores al mismo tiempo
• Tecnología integrada de compensación de arranque de alto rendimiento del sensor sin ponderación
• Cálculo avanzado del vector espacial y ser compatible con el codificador del motor AM / SM
• Control vectorial de corriente de alto rendimiento, salida de par del 180% a velocidad cero
• Modo de rescate de emergencia de bajo voltaje del UPS monofásico AC220V, busca la dirección en carga ligera
• Seguridad que permite la entrada de hardware conforme a las normas EN81
Funciones especiales
• Admitir comunicación serial y paralela.
• Terminal de mano: interfaz independiente hombre-máquina, sistema de ayuda en línea chino / inglés; funciones de gestión de depuración, gestión de rastreo de depuración, carga / descarga de parámetros, copia de datos de computadora
• El terminal de mano se puede conectar a la interfaz CAN en el automóvil para una configuración conveniente de los parámetros
• Agregar el módulo de Internet TCP / IP para la depuración y el control remotos
• Soportar de control remoto del protocolo TCP / IP
II. Configuración del elevador KONE
Hay un ascensor fuera de servicio debido a una falla en la negociación de AMC.
Pestaña 1 Información de elevación
| Lift speed | 1.0 m/s |
| Capacity | 6 persons, 408KG |
| Floor | 7 floors |
| Power supply | 3phase 415V |
| Motor type | Synchronous motor |
| Rated power of motor | 3.7kW |

Fig. 1 Panel de control KONE y variador de frecuencai
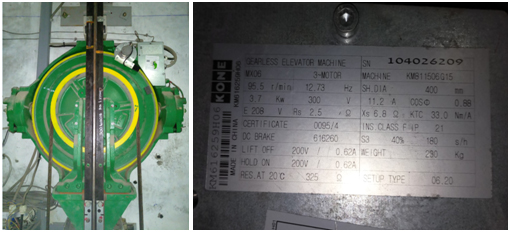
Fig. 2 Motor KONE y placa de identificación del motor.
III. Solución EC160A para reequipamiento de elevadores KONE
1. Configuración eléctrica EC160A
1.De acuerdo con la configuración del elevador y las funciones exigentes, proporcionamos la solución eléctrica de la siguiente manera. Considerando una temperatura ambiente más alta, se selecciona un grado más alto de clasificación de controlador inteligente.
Pestaña 2 Lista de configuración
| Item | Model | Qty |
| EC160 integrated machine | EC160A-5R5-4 | 1 |
| Handheld operator | EC-PAD | 1 |
| Encoder | 8.5000.0000.1024.S026.0070 | 1 |
| Sensor | PF125-8DN | 1 |
| Display and calling board | 7 segment | 8 |
| Brake resistor | 50Ω/2000W | 1 |
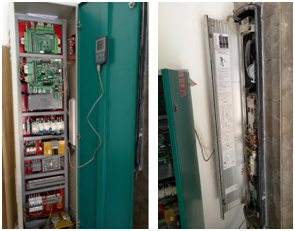
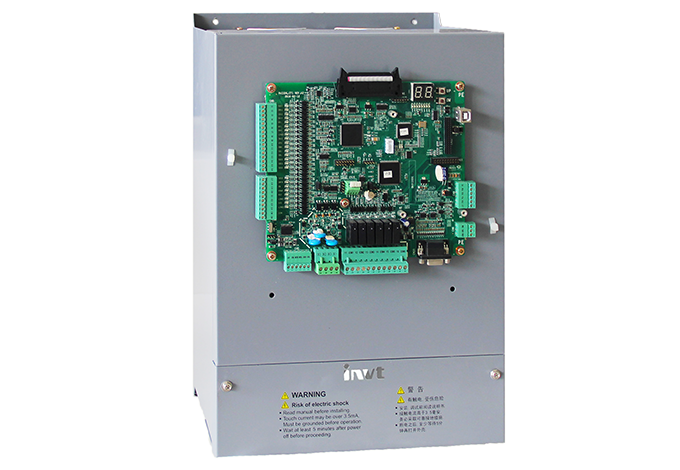
Fig. 3 Panel de control EC160A
2. Adaptador de encoder
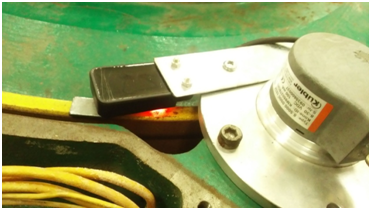
2.1 Instalar el codificador de acuerdo con que se muestra en la siguiente imagen:
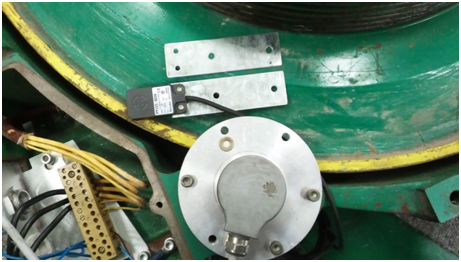
2.2 Usar un tornillo M3 para fijar el sensor en el soporte de acuerdo con que se muestra en la siguiente imagen:
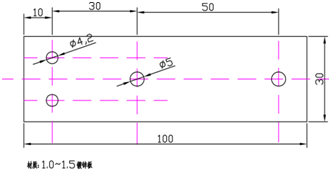
2.3 Usar un tornillo M4 para fijar el soporte en la placa de brida del codificador. El sensor debe estar debajo del soporte y cerca del lado de la rueda del motor de acuerdo con que se muestra en la imagen a continuación, y usar pegamento para fijar el imán:

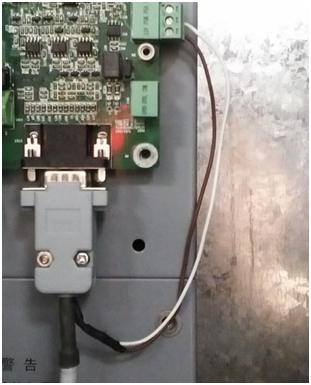
2.4 Conectar la señal del sensor a EC160A SUDZ y el cable de alimentación a 24+ y 24-:
2.5 Realizar la conexión del cable del codificador de acuerdo con la siguiente lista
| EC160A CN10(DB15) | Encoder signal | EC160A CN9 |
| 1 | B- | / |
| 5 | AA | / |
| 6 | A- | / |
| 7 | 0V | PGM |
| 8 | B+ | / |
| / | +UB | 12V |
3. Ajuste de parámetros EC160A
Los parámetros básicos de configuración son los siguientes.
| Function Code | Name | Description | Setting Value |
| P0.00 | Control mode | 1, Vector control with PG | 1 |
| P0.01 | Rated speed of the elevator | 0.100~6.00 m/s | 1.0 |
| P0.02 | Max. speed of the elevator | 0.100~P0.01 m/s | 1.0 |
| P0.03 | Max. output frequency | 10.00~400.00Hz | 12.73 |
| P0.04 | Diameter of traction sheave | 100~2000mm | 400 |
| P0.05 | Reduction ratio | 1.00~60000 | 16666 |
| P0.06 | Suspension ratio of rope | 1~8 | 2 |
| P1.00 | Increasing acc 1 | 0.001~1.000m/s3 | 0.2 |
| P1.01 | Increasing acc 2 | 0.001~1.000m/s3 | 0.2 |
| P1.02 | Acc speed | 0.001~1.000m/s2 | 0.4 |
| P1.03 | Reducing dec 1 | 0.001~1.000m/s3 | 0.2 |
| P1.04 | Reducing dec 1 | 0.001~1.000m/s3 | 0.2 |
| P1.05 | Dec speed | 0.001~1.000m/s2 | 0.4 |
| P1.06 | Door area | 0~1000mm | 100 |
| P2.00 | Motor type selection | 0: Asynchronous motor | 0 |
| P2.01 | Rated power of the motor | 0.1~150.0kW | 3.7 |
| P2.02 | Rated frequency of the motor | 3.00~400.00Hz | 12.73 |
| P2.03 | Rated speed of the motor | 1~3000rpm | 96 |
| P2.04 | Rated voltage of the motor | 0~460V | 300 |
| P2.05 | Rated current of the motor | 0.1~1000.0A | 11.2 |
| P3.00 | Encoder type selection | 0~6 | 6 |
| P3.01 | Encoder resolution | 1~10000 | 1024 |
| P3.00 | Encoder direction | 0: Forward input | 0 |
| P4.00 | ASR low speed proportional gain | 0~100 | 30 |
| P4.02 | Low speed detection filter time | 0~8 | 2 |
| P4.04 | ASR high speed proportional gain | 0~100 | 20 |
| P4.06 | High speed detection filter time | 0~8 | 2 |
| P4.08 | ACR proportional coefficient P | 0~65535 | 600 |
| P4.10 | ACR filter coefficient | 0~65535 | 64 |
| P4.09 | ACR integral coefficient I | 0~65535 | 600 |
| P5.09 | Threshold of over speed deviation | 0.1%~50.0% | 30.0 |
| P5.10 | Detection time of over speed deviation | 0.000~10.000 | 1.500 |
| A1.01 | Total floor setting | 2~64 | 5 |
| T0.04 | Brake opening delay | 0~5.000s | 0.600 |
| T0.05 | Brake closing delay | 0~5.000s | 0.600 |
| T0.07 | Direction cancel delay | 0~5.000s | 0.600 |
| T0.14 | Speed reference delay | 0~5.000s | 0.600 |
| F0.00 | High/low voltage detection | 1: only detection lower voltage | 1 |
| F0.13 | Line 2 function selection | 35: UPS output detection | 35 |
| F0.18 | Relative selection of elevator running | 1: calling below 32 floors connect to inside line | 1 |
| F0.21 | Leveling distance | 0~65535 | 100 |
| F0.22 | UPS application | 0: 220V power supply | 0 |
•Inteligente integrado: EC160A es la combinación de controlador y unidad.
• Support dual communication methods: Serial and parallel communication.
•Simple y estable: 2 juegos de interfaz de comunicación CAN hacen que el sistema sea simple, altamente eficiente y estable.
•Depuración fácil: el operador LCD con pantalla de 10 filas puede mostrar toda la información del estado de ejecución.
Facilita la depuración.
•Función ARD: con UPS monofásico de 220 VCA, el EC160 puede funcionar hasta el piso más cercano y abrir la puerta cuando la red está apagada.
IV. Conclusión
Después de la adaptación por EC160A, el elevador KONE funciona perfectamente. El cliente está muy satisfecho. Prueba que el monopolio puede romperse. Cada vez más clientes elegirán INVT EC160A para reemplazar el sistema KONE en el futuro. EC160A tiene amplias perspectivas de mercado.






Nuestro sitio utiliza cookies para brindarle una mejor experiencia en el sitio. Al continuar navegando por el sitio, acepta nuestro uso de cookies de acuerdo con nuestra Política de cookies.












 Compartir
Compartir
 Facebook
Facebook
 Twitter
Twitter
 Google+
Google+
 LinkedIn
LinkedIn
 Lista de devoluciones
Lista de devoluciones